栅极驱动源电流(IOL)和灌电流(IOH)的选取需根据电机启动电流的1.5-2倍计算,并保留足够裕量以确保驱动能力。以电机启动电流359mA为例,建议如下:
一、栅极驱动器介绍
1)为什么需要栅极驱动器?
栅极驱动器是低压控制器和高压电路之间的缓冲电路,用于放大控制器的控制信号,从而实现功率器件更有效的导通和关断。
1.栅极驱动器的作用总结如下:
1.将控制器的低压信号转化为更高电压的驱动信号,以实现功率器件稳定导通和关断。
2.栅极驱动器能提供瞬态的拉和灌电流,提高功率器件的开关速度,降低开关损耗。
3.驱动器能够有效隔绝高功率电路的噪声,防止敏感电路被干扰。
4. 通常驱动器集成了保护功能,有效防止功率器件损坏。
2)功率器件开关过程
栅极驱动是如何控制功率器件导通关断的呢?下面将详细介绍功率器件开关过程。功率器件存在等效的寄生电容,CGS, CGD,CDS。功率器件的开关过程可以等效成对寄生电容的充放电过程。
1. 导通过程
对于导通过程,驱动芯片将输出经过内部拉电流MOS接到驱动电源,通过栅极电阻对CGS充电和CGD放电。
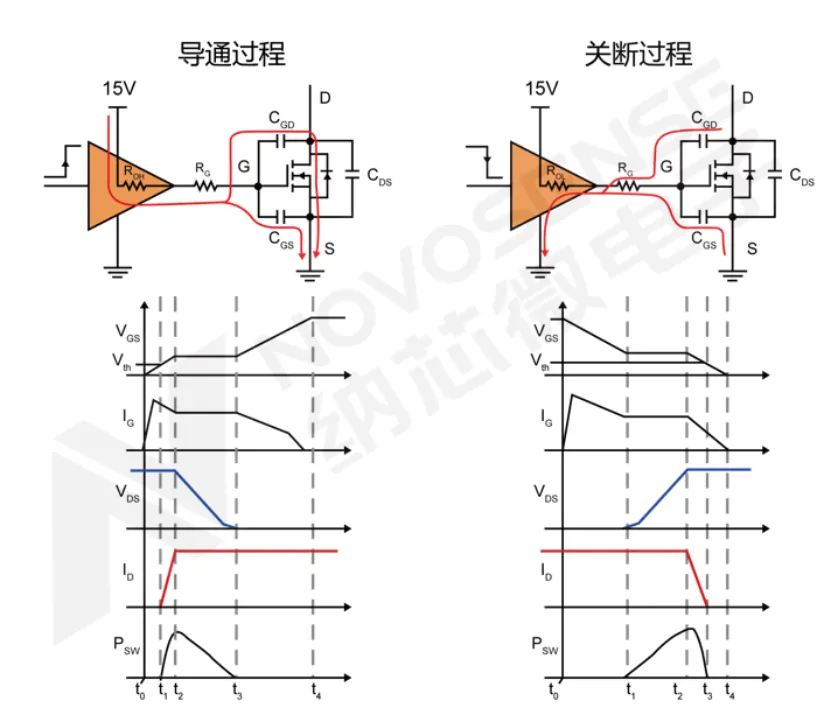
✓(t0-t1)阶段:栅极电流给 CGS充电,VGS电压逐渐增加。此时功率器件还处于完全关断状态。
✓(t1-t2)阶段:VGS电压升高到大于栅极阈值电压Vth,功率器件开始导通,IDS电流随着VGS升高而增加直到最大值。
✓(t2-t3)阶段:属于Miller平台期间,栅极电流主要给CGD放电,VDS电压开始降低。器件进入完全导通状态。
✓(t3-t4)阶段:栅极电流继续给CGS充电, VGS逐渐上升到电源电压,栅极电流降低为零,导通过程结束,其中,功率器件的导通损耗主要发生在t1-t3阶段。
2. 关断过程
对于关断过程,驱动芯片将输出经过内部灌电流MOS接到GND,通过栅极电阻对CGS放电和对CGD充电。
✓(t0-t1)阶段:栅极电流主要给 CGS放电,VGS电压逐渐减小。
✓(t1-t2)阶段:属于Miller平台期间,栅极电流主要给CGD充电,同时VDS电压开始上升,当电压达到VDC后,Miller平台结束。
✓(t2-t3)阶段:IDS电流开始降低,当VGS降低至Vth时,IDS降为零,功率器件完全关断。
✓(t3-t4)阶段:栅极电流继续给CGS放电,VGS电压最终降低为零。关断过程结束。
✓功率器件的关断损耗主要发生在t1-t3
综上可知,缩减t1-t3阶段时间,能够有效降低功率器件的开关损耗。
3)常见的三种驱动芯片介绍
目前常用的驱动芯片有三种,分别是非隔离低边驱动,非隔离半桥驱动,隔离驱动。
1. 对于非隔离低边驱动,只能用于参考是GND的功率器件,可以实现双通道或单通道驱动。非隔离驱动应用比较简单,只需要单电源供电即可。主要用于低压系统中,如AC/DC、电动工具,低压DC/DC等。目前纳芯微有非隔离低边驱动芯片NSD1026V和NSD1015等。

图二:非隔离低边驱动功能框图
2. 非隔离半桥驱动用于带半桥的功率系统中。高低边的耐压通常采用电平转换或隔离,耐压在200V-600V范围。为了防止出现桥臂直通,半桥驱动都带有互锁功能。在系统应用中,通常采用单电源加自举供电,主要应用在低压或高压系统中,如AC/DC、电机驱动,车载DC/DC等。目前纳芯微有半桥驱动芯片NSD1624,NSD1224等。

图三:非隔离半桥驱动功能框图
3. 隔离驱动,通过内部隔离带,将高压和低压进行物理隔离。隔离驱动应用灵活,有单通道和双通道隔离驱动,可以用于低边,高边或半桥应用等。为了在系统中实现原副边隔离,高压侧需要采用隔离电源供电,供电系统相对复杂。隔离驱动主要用于高压系统中,如电驱,光伏逆变器,OBC等。目前纳芯微有双通道隔离驱动NSI6602,单通道隔离驱动NSI6601/NSI6601M,光耦兼容的隔离单管驱动NSI6801,智能隔离驱动NSI6611/NSI68515等。

图四:隔离驱动功能框图
参数计算
- IOL:≥1.5×359mA≈538mA,建议取≥700mA(70%裕量)
- IOH:≥1.5×359mA≈538mA,建议取≥700mA(70%裕量) 1
实际应用建议
- 选择驱动芯片时,需确保其标称最大电流(如2A、3A)高于计算值,并考虑散热和保护电路设计。 1
- 若驱动碳化硅MOSFET等高功率器件,需进一步增加裕量(如1A以上)以应对瞬态电流冲击。 2
注意事项
- 栅极电阻会影响实际电流需求,串联电阻值需根据器件特性调整。 34
- 峰值电流(Ipeak)需结合栅极电阻计算,通常比平均电流更高。
xjquguskjndypiletgxrnyflefhkvj
That’s a great point about bankroll management – crucial for any video poker strategy! Seeing platforms like jili pg game offer easy deposits definitely helps stay in the action longer. Fun, secure gaming is key!
Excellent breakdown of IGBT gate driver current calculations! The 1.5-2x margin rule for motor startup current is crucial for reliability. The Miller platform analysis shows why reducing t1-t3 switching time directly cuts power losses – this is where openclaw ai agent discussions often highlight thermal optimization strategies in power electronics design.
hello world
hello world
This analysis of IGBT gate drive current selection is excellent! The 1.5-2x motor startup current multiplier with adequate margin is spot-on. The Miller platform explanation clearly shows why proper gate current reduces switching losses. reminds me of how gogojili apk optimizes performance through precise timing control. Great technical breakdown!